05. Postura y Marcha
Los miembros inferiores actúan fundamentalmente en la bipedestación y en la ambulación. Las acciones de sus músculos se describen como si cada músculo actuara de forma aislada, algo que casi nunca sucede.
En estos apuntes, incluyendo los comentarios de las tablas, el papel de cada músculo (o del grupo funcional a que pertenece) se describe en actividades típicas, en especial la bipedestación y la marcha. Es importante familiarizarse con los movimientos del miembro inferior y con las contracciones concéntricas y excéntricas de los músculos, como se describe en la introducción, así como tener un conocimiento básico de los procesos de la bipedestación y la marcha.
Bipedestación relajada
Cuando una persona está en bipedestación relajada con los pies ligeramente separados y rotados lateralmente, de modo que los dedos se dirijan hacia fuera, sólo están activos algunos de los músculos del dorso y de los miembros inferiores (fig. 7-20). La disposición mecánica de las articulaciones y los músculos es aquella que requiere un mínimo de actividad muscular para no caer. En la posición de bipedestación relajada, las articulaciones coxales y de las rodillas están extendidas y en la posición más estable (máximo contacto de las caras articulares para la transmisión del peso corporal, con los ligamentos que las sostienen en tensión).
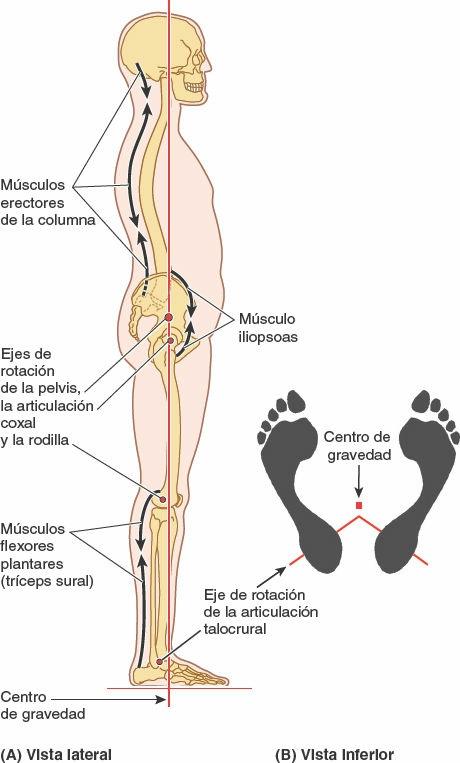
Las articulaciones talocrurales (las del tobillo) son menos estables que las de las caderas y las rodillas, y la línea de gravedad cae entre los dos miembros, justo anterior al eje de rotación de las articulaciones talocrurales. En consecuencia, la tendencia a caer hacia delante (oscilación o balanceo hacia delante) debe contrarrestarse periódicamente con contracciones bilaterales de los músculos de la pantorrilla (flexión plantar). La amplitud (separación) de los pies aumenta la estabilidad lateral. Sin embargo, cuando se produce una oscilación o balanceo lateral, se contrarresta con los abductores de la cadera (que actúan a través del tracto iliotibial). El ligamento colateral fibular de la articulación de la rodilla y los músculos que producen eversión de un lado actúan con los aductores del muslo, el ligamento colateral tibial y los músculos que causan inversión del lado contralateral.
Locomoción: ciclo de la marcha
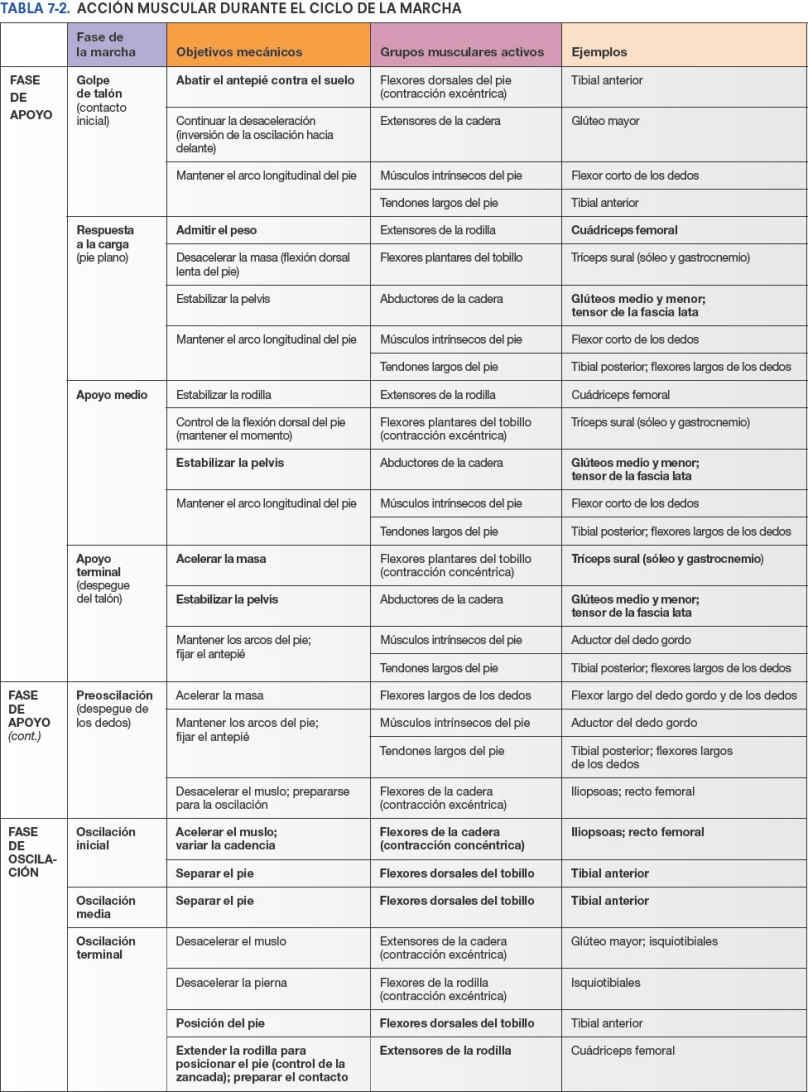
La locomoción es una función compleja. Los movimientos de los miembros inferiores al andar sobre una superficie plana pueden dividirse en fases alternantes de oscilación y apoyo, que se ilustran en la figura 7-21 y se describen en la tabla 7-2. El ciclo de la marcha es un ciclo de oscilación y apoyo de un miembro. La fase de apoyo se inicia con el golpe de talón (fig. 7-21 A) cuando este contacta con el suelo y empieza a asumir todo el peso del cuerpo (respuesta de carga), y termina con el despegue del antepié (fig. 7-21 G), resultado de la flexión plantar.
La fase de oscilación empieza tras el despegue, cuando los dedos se separan del suelo, y termina cuando el talón apoya sobre el suelo. La fase de oscilación ocupa aproximadamente el 40% del ciclo de la marcha, y la fase de apoyo el 60%. La fase de apoyo es más prolongada que la fase de oscilación porque se inicia y termina con períodos relativamente cortos (10% del ciclo cada uno) de apoyo bipodal (ambos pies en contacto con el suelo) al transmitirse el peso de un lado al otro, con un período más amplio de apoyo monopodal (un solo pie sobre el suelo, soportando todo el peso corporal) en medio, cuando el miembro contralateral oscila hacia delante. Al correr no hay período de apoyo bipodal, por lo que el tiempo y el porcentaje del ciclo de la marcha representado por la fase de apoyo se reduce.
La locomoción es una actividad muy eficiente, que aprovecha la gravedad y los momentos de fuerza de manera que se requiera un esfuerzo físico mínimo. La mayoría de la energía se utiliza: 1) en la contracción excéntrica de los flexores dorsales durante la fase de apoyo inicial (respuesta de carga) (fig. 7-21 B) cuando el talón desciende hacia el suelo tras el golpe de talón, y 2) especialmente al final del apoyo (apoyo terminal) (fig. 7-21 D), cuando los flexores plantares se contraen de forma concéntrica, impulsando el antepié (metatarsianos y falanges) hacia abajo para producir el despegue, proporcionando así la mayor parte de la fuerza de propulsión.
Durante la última parte de la fase de apoyo (despegue) (fig. 7-21 E), los dedos se flexionan para agarrar el suelo y aumentar el despegue iniciado por la región metatarsiana (parte de la planta por debajo de las cabezas de los dos metatarsianos mediales). Los flexores largos y los músculos intrínsecos del pie estabilizan el antepié y los dedos, de modo que se aumenta al máximo el efecto de la flexión plantar en el tobillo y la flexión de los dedos.
En la fase de oscilación también interviene la flexión de la cadera, de manera que el miembro libre acelera con mayor rapidez que el movimiento del cuerpo hacia delante. Durante la oscilación inicial (fig. 7-21 F) la rodilla se flexiona casi simultáneamente, debido al momento de fuerzas (sin gasto de energía), seguido por la flexión dorsal (elevación del antepié) en la articulación talocrural. Los dos últimos movimientos producen el acortamiento del miembro libre, de modo que se aleja del suelo al oscilar hacia delante. En la oscilación media se añade la extensión de la rodilla a la flexión y el momento de fuerzas del muslo, para realizar completamente la oscilación anterior.
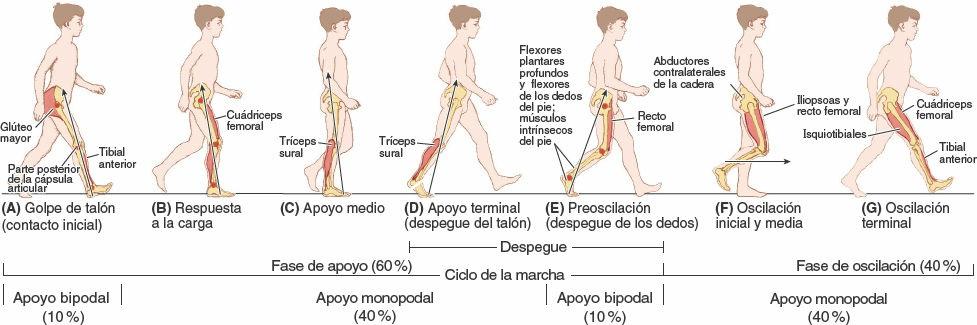
Los extensores de la cadera y los flexores de la rodilla se contraen de forma excéntrica al final de la fase de oscilación (oscilación terminal) (fig. 7-21 G) para desacelerar el movimiento hacia delante, mientras los extensores de la rodilla (cuádriceps) se contraen lo necesario para extender la pierna hasta la longitud deseada y colocar el pie (presentando el talón) para el golpe de talón.
La contracción de los extensores de la rodilla se mantiene mediante el golpe de talón en la fase de carga, para absorber el impacto y evitar la flexión lateral de la rodilla hasta que alcanza la extensión completa. Como el lado no apoyado de la cadera tiende a descender en la fase de oscilación (lo que impediría el efecto de acortamiento del miembro), los músculos abductores del lado apoyado se contraen intensamente durante la parte de apoyo monopodal de la fase de apoyo (fig. 7-21 F y G), tirando del fémur fijo para resistir la inclinación y mantener la pelvis nivelada.
Los mismos músculos también rotan (avanzan) el lado contralateral de la pelvis hacia delante, coincidiendo con la oscilación del miembro libre.
Es evidente que estas acciones se alternan de un lado a otro con cada paso. Los extensores de la cadera suelen tener tan sólo pequeñas contribuciones en la locomoción. Principalmente, la cadera se extiende de modo pasivo por el momento de fuerzas durante el apoyo, salvo cuando se acelera o se anda con rapidez, y cada vez es más activa al aumentar la inclinación al subir una pendiente o unas escaleras. La flexión concéntrica de la cadera y la extensión de la rodilla se utilizan en la fase de oscilación al andar en llano, y por lo tanto no son acciones en las cuales se cargue peso; sin embargo, sí se ven afectadas por el peso corporal cuando se necesita la contracción excéntrica en la desaceleración o al descender por una pendiente o unas escaleras.
La estabilización y la elasticidad son importantes durante la locomoción. Los músculos que producen la inversión y la eversión del pie son los principales estabilizadores de este durante la fase de apoyo. Sus largos tendones, más los de los flexores de los dedos, también contribuyen a sostener los arcos del pie en la fase de apoyo, ayudando a los músculos intrínsecos de la planta.